関連:
工学を学ぶ上で必要となる知識車両にせよアームにせよ、2次元または3次元に動くものの制御(特に位置制御)を行ううえでベクトルを理解していないと全く話が進みません。
導入部分は説明するまでもないかもしれませんが、一応説明をしておきます。
ベクトルの概念
数学の教科書的に説明すると
大きさと向きを持った量、工学的な使われ方だと
関連する複数の値(スカラー値)をまとめたものといった感じになります。
まとめた値をひと塊で扱う事が目的となります。
長さじゃなかったり、長さと角度が混ざったり、4次元以上だったりもしますが、とりあえず今回は数学(線形代数)、物理的な内容としては
長さ/座標/力の話として考えます。
この場合
X方向、
Y方向、
Z方向の成分をひと塊で扱うことが一つの大きな目的です。
ベクトルの使い道
力を計算する場合

1つの点にベクトル1の力とベクトル2の力が加わっているイメージです。
ベクトルの成分
x1,
y1および
x2,
y2はそれぞれX方向の力と、Y方向の力を表します。
ベクトル1とベクトル2を足し合わせるとベクトル1+2ができます。
このとき、ベクトル1+2の成分は各軸の値を足し合わせてX方向成分:
x1+
x2、Y方向成分:
y1+
y2となります。
座標を計算する場合

ベクトル1の座標まで移動して、更にベクトル2の方向へ動くイメージです。
同じくベクトル1とベクトル2を足し合わせます。
力の場合とは見た目がちょっと違いますが、ベクトル1+2はX方向成分:
x1+
x2、Y方向成分:
y1+
y2となります。
ここまでは特に問題ないと思います。
ベクトルの表し方
ここからちょっとややこしくなります。
同じものを表すことにおいても
扱う場面によって微妙に考え方が変わります。
・始点座標を指定する/しない
・長さ(大きさ)を指定する/しない
更に
・向きの指定の仕方
も変わります。
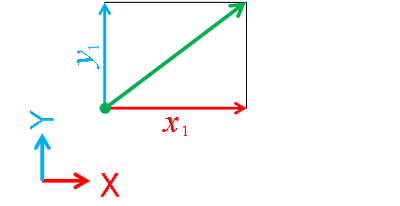
始点座標を気にしない場合
パターン1:
移動量x1,
y1を指定する。
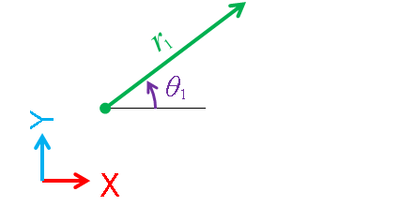
パターン2:
長さrと
角度θを指定する。
パターン3:
長さr、向きを
各軸の比率u1x,
u1yで指定する。
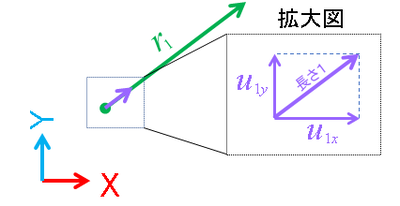
これらはすべて同じ緑色のベクトル示しているのですが、指定方法がバラバラです。
これらはお互いに変換することができます。
使い道で示したような足し合わせが可能なのはパターン1の場合のみです。
始点座標と大きさを両方指定する場合
パターン4:
始点座標PAを指定して、
終点座標PBを指定する。
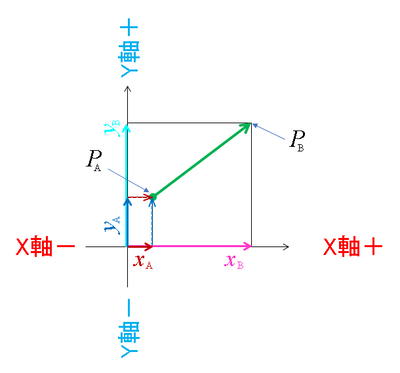 点A
点Aから
点Bに向かうベクトルがこのパターン。
パターン5:
始点座標PAを指定して、始点からの各軸方向の
移動量x1,
y1を指定する。
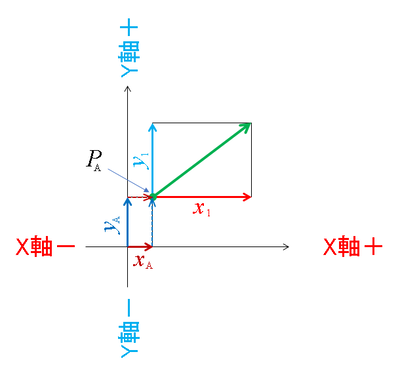
パターン1に加えて始点座標を指定する場合です。
パターン6:
始点座標PAを指定して、
長さrを指定し、向きを
角度θで指定する。
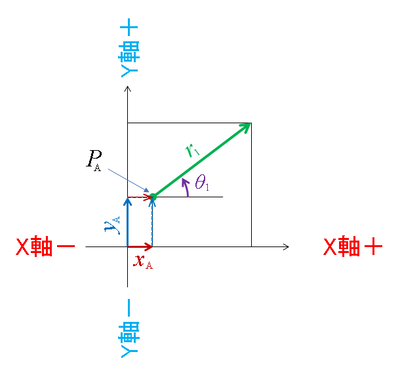
パターン2に加えて始点座標を指定する場合です。
パターン7:
始点座標PAを指定して、
長さrを指定し、向きを
各軸の比率u1x,
u1yで指定する。
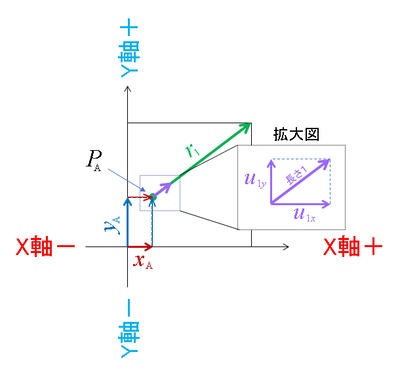
パターン3に加えて始点座標を指定する場合です。
これら4つもすべて同じ緑色のベクトル示しているのですが、指定方法がバラバラです。
始点座標PAについても
長さ+
角度や
長さ+
比率で表すことがあります。
どのパターンをよく使うかは分野によって偏りがあると思います。
私はパターン7に遭遇することが多いと思います。
これらはすべて長さを表している場合はお互いに変換することができます。
数学なり工学なりの授業ではこれらが何の前置きもなく混在して説明されます。
力学関連だと
座標PAに対して
緑のベクトルが力を表すこともあり、その場合は
パターン4へは変換することができません。
使い道のところで話をしたベクトルの足し合わせは、パターン1またはパターン5でしか成り立たたないはずです。
今回はここまで。