ライントレースに使う車体を作成します。
関連:
ライントレース関連記事一覧ライントレースとは床に黒い線(ライン)が引いてあってそれに沿って(トレース)動かす方法のこと。
移動ロボットの制御の基本形の1つです。
工場内を移動する自動搬送車も磁気テープを使用したライントレース方式のものがあります。
これができればロボット相撲の様な台から落ちない制御もおおよそできる様になります。
材料
機械部品・
ツインモーターギヤボックス(モーターもついてきます)
・
ユニバーサルプレート2枚セット Amazon(後で2段構造にしたいので)
・
トラック&ホイールセット Amazon(俗に言うキャタピラ)
・ノイズ対策用
積層セラミックコンデンサ0.1μF(表記104)
・モーター用の電線
動作テスト用の電気部品・
モーターを回してみる回で使用した部品2モーター分
モータドライバ
TA7291P×2
プルダウン用抵抗10kΩ×4
電解コンデンサ47μF×1
・
光センサーの回で使用したフォトリフレクタ関連の部品2セット
フォトリフレクタ
LBR-127HLD×2
赤外線LED電流制限用抵抗200Ω×2
プルダウン抵抗47kΩ×2
・フレッドボード
・5V電源と電源端子
車体の組み立て
とりあえずツインモーターギヤボックスを組み立てます。

モーター付きプラモデルです。
同じタミヤのミニ4駆より多少複雑です。
ゾイドよりはよっぽど簡単です。
ツインモーターギヤボックスはメカ鳴き(高音でギャリギャリ音がする)事が多いのですが、原因と対処方法を検討中。
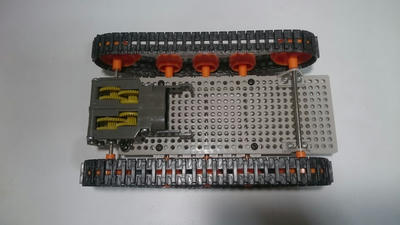
ユニバーサルプレートにツインモーターギヤボックスとトラック&ホイールセットを組み付けます。
トラック&ホイールセットの中身はこんな感じ。

ベルトの連結部分に外れ防止用のピンと穴が付くようになってからベルトが外れる心配をしなくて良くなりました。

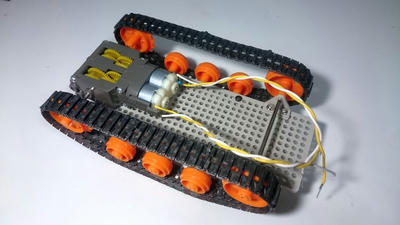
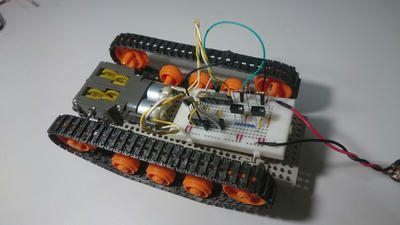
組み付け後

センサーを取り付けやすいように前方(写真右側)にスペースを設けてあります。
ゴムベルトは
・長いの×2
・中ぐらい×2
・短いの×1
にしてあります。
強すぎず、弱すぎずのベルトの張り具合にします。
配線準備
モーターにコンデンサと配線を取り付けます。
直流モーターはモーター内部で配線(整流子)の接続が自動的に切り替わることで回転し続ける様な設計になっています。
この
整流子が切り替わる瞬間に
大きなノイズが発生します。
また回転中は
整流子が擦れて動いているため、この時にも
ノイズが発生します。
このノイズが意外と大きく、
数十ボルトになることもあります。
これをそのままモータドライバやマイコン基板と接続すると
ノイズが基板に逆流して
マイコンが誤動作したり最悪の場合
電子回路が壊れてしまいます。
そこでノイズ対策としてモーターの端子間にコンデンサを接続します。
積層セラミックコンデンサ(セラコン)の0.1μ(表記104)を使用します。
セラコンは極性がありません。
コンデンサの選定基準は
よくわかりません。
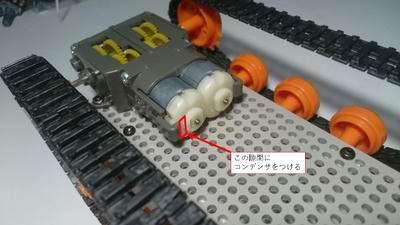
極性のあるコンデンサは使わないでください。今回はツインモーターギヤボックスを使用するため、ギヤボックスに干渉しない位置にコンデンサを取り付ける必要があります。
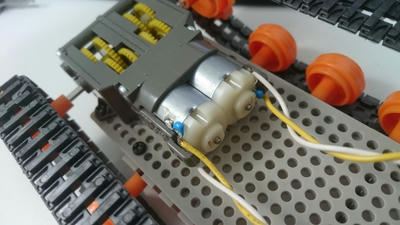
そこで、この隙間にコンデンサが入るように取り付けます。
まずコンデンサの足をいい感じに曲げておいて

コンデンサをセロテープでモーターに仮止めしておいて

あとは半田付け

そのまま配線も半田付け

モーターが動いて半付けしにくかったら何か工具を乗せるなりして固定してください。
コンデンサの余分な配線を切って出来上がり。
これでキッチリギアボックスにおさまります。
半田付けの腕に自信のある方はフラックスを使ってモーターのフレームにコンデンサを半田付けするといいらしいです。

センサを使って動かしてみる
モーター制御の回の回路と
光センサーの回の回路を直結して動かしてみます。
光センサーの回路は2セット組み立てます。
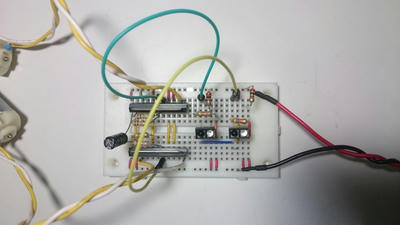
電流制限抵抗とプルダウン抵抗は各センサごとに必要になります。
それぞれのフォトリフレクタに指を近づけると左右のモーターがそれぞれ回転すれば成功です。
このままではセンサーが上向きで床の線を検出できないので、次回はセンサー部分の基板を作成します。