初めて車輪型倒立ロボットを作成する人向けにどの様な構成だと倒立制御を成功させやすいか検討してみます。
ただし、あくまで自作することが前提なので倒立制御キットは除外します。
関連:
・
センシング準備・
諸元測定・
制御方法基礎失敗しやすい原因・構造的に無理がある
・作業難易度が高い
・想定外の事が起きている
これらの原因を回避ながらタミヤの楽しい工作シリーズをベースに作ることを考えます。
構造的に無理がある
移動速度が遅すぎると立ちません。
基本的には転倒速度を打ち消すだけの速度を出す必要があります。
どれぐらいの速度があれば立つか調べてみました。
10~15cmくらいのロボットであれば実測値で0.3m/sあたりから安定して立たせることができました。
速すぎるとモーターの速度調整が難しくなります。
車軸に発生するモーメントの都合上、タイヤ径は大きい方が立たせやすい傾向にあります。
基本的に背が高い方が
慣性モーメントと
空気抵抗の影響でゆっくり倒れるため制御が簡単になります。ただ、同じ慣性モーメントでも
重心自体は低い方が制御しやすいので上下に長いより、鳥やティラノサウルスの様に
前後に長い方が安定化させやすい気がします。
倒立を行うには傾斜角度と傾斜速度を
高速で取得する必要があります。
加速度センサーで角度を求めると車両の加速度が載るので傾斜角度を正確に把握できません。
そこで、
ジャイロが必要になってきます。
しかし、
ジャイロの積算だけでは誤差が出てきます。
ジャイロだけでも倒立は可能ですが加速度を併用した方が簡単です。
転倒時の角速度は
1000deg/s程度になり、ジャイロもこれに対応できなければいけません。
また、アナログ信号だと
ノイズや
ドリフトの問題が出やすいので通信タイプが安心です。
3軸加速度+3軸ジャイロ一体型がおすすめです。
作業難易度が高い
エンコーダ無しでも立ちますがパラメータ調整が難しくなります。
エンコーダを取り付けるのは厄介で部品の加工難度が高い傾向にあります。
タミヤギヤボックスに取り付け可能なエンコーダも販売されていますが、
回転方向が分からなかったり、
高かったりするので自信をもっておススメはできません。
別のモーター用の磁気エンコーダなら仕込めそうですが加工難度は高めです。
シングル/ダブルギヤボックスであれば
マウス用のエンコーダを取り付ける方法があります。
マイコンは
・PWM出力
・エンコーダ用パルス入力
・ジャイロ接続
・float型計算
が必要です。また、標準機能として
三角関数が使える方が無難です。
RL78G10でも立ちはしますが、実質的にfloat型が使えないのでものすごく苦労します。
データ取りの際に
無線通信ができると作業が楽になります。
想定外の事が起きている
頻繁に発生してなおかつなかなか原因にたどり着けないのが
モーターの電流値です。
FA130の場合3Vだと始動時に4Aぐらい流れ、
正逆を繰り返すと6Aぐらいになります。
モータードライバがこの値に対応できないと
保護回路が働いて停止したり、
保護機能がないものはモータードライバが壊れます。
電源についても同様で、モーター電源とCPU電源が共通の場合は
瞬間的な電源電圧低下による
CPUおよびジャイロのリセットにも気を付ける必要があります。
モーターとCPU電源を共通化する場合は
昇降圧レギュレータを使うと安心です。
例によって
モーターの逆起電力が制御特性に悪影響を与えるので、
常時回生可能なモータードライバをおすすめします。これだけで難易度がかなり変わります。
モーターの
コギングトルクとこれに伴う
ヒステリシスも無視できません。
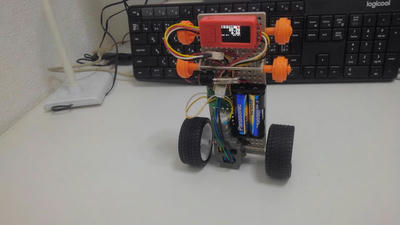
おススメの構成
・ギヤボックス タミヤ シングルギヤボックス、またはダブルギヤボックス(38.2:1 / 114.7:1)
・タイヤ タミヤ スポーツタイヤまたはスリムタイヤ(大径)
・モーター ノーマルFA130
・モーター電源 単3×2 ※できれば5A以上流せるリチウムイオンバッテリー
・ドライバ DRV8835(AE-DRV8835-P)
・エンコーダ アルプスEC10E
・マイコン M5StickC
・ジャイロ M5StickC内蔵
ギヤ比は落ち着きを求めるなら114.7:1、対応角度の範囲を求めるなら38.2:1
低回転型130モーターは電流制限にかかりにくいもののコギングトルクが大きいので、
超低速の制御には向いていない様です。ただし、立たないわけではないので選択肢には
入ります。
ノーマルのFA130はブラシの耐久性が低いのがちょっと心配です。
電池については長時間動かしていると電圧が下がって制御特性が変わります。
大容量のリチウムバッテリーが理想的ですが過放電の保護回路入りだと5A流せるタイプはあまりありません。(例:KEEPPOER 18650 15A放電仕様)
入手性と価格の観点からとりあえず単3×2あたりをおすすめします。
マイコンについて自作としてはちょっと手抜き感がありますが、マイコンに慣れていない方はM5StickCをおすすめします。
マイコンの選定条件に加えて
・ジャイロ搭載
・バッテリー内蔵
・小型
・液晶付き
なので様々なトラブルを回避できます。
PC側のプログラムを作成する必要もありますが
WiFiでUDP通信ができます。
WiFiが使えなくてもUSBでシリアル通信できます。
M5StickCを知るきっかけになった
木楽らぼ様もM5系で倒立制御をされてます。
マイコンの扱いに慣れている人は任意のマイコンで問題ありません。
次回:
センシング準備編