Fグループ電子工作講座
秋月電子SH7125ボードで始めるマイコン開発
Home
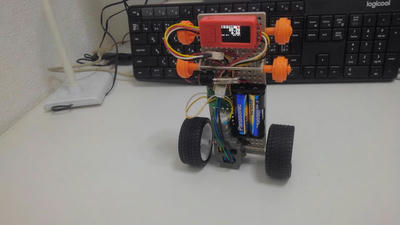
バランス制御
倒立制御解説(ハード編)
初めて車輪型倒立ロボットを作成する人向けにどの様な構成だと倒立制御を成功させやすいか検討してみます。
ただし、あくまで自作することが前提なので倒立制御キットは除外します。
関連:
・
センシング準備
・
諸元測定
・
制御方法基礎
失敗しやすい原因
・構造的に無理がある
・作業難易度が高い
・想定外の事が起きている
これらの原因を回避ながらタミヤの楽しい工作シリーズをベースに作ることを考えます。
つづきはこちら
PR
バランス制御
2023/01/22 14:28
0
前のページ
Home
次のページ
プロフィール
HN:
ぼんどF博士
性別:
男性
自己紹介:
YouTube:
Fグループ電子工作動画
GitHub:
project12513
X:
@project12513
カテゴリー
マイコンを始めるにあたって(9)
機能一覧(9)
ソフトウェアの基礎知識(14)
SHソフトウェア開発(35)
RXソフトウェア開発(12)
RL78ソフトウェア開発(11)
回路設計の基礎知識(5)
周辺回路設計(23)
動力部品など(13)
RaspberryPi開発(13)
数学の基礎(3)
バランス制御(6)
つくばチャレンジ(14)
愚痴(説教)(3)
最新記事
つくばチャレンジ2026向けGNSSデータ
(2026/07/17)
つくばチャレンジ2025_1205メモ
(2025/12/06)
つくばチャレンジ2025_1129メモ
(2025/12/03)
つくばチャレンジ2025_1108メモ
(2025/11/17)
つくばチャレンジ2025_1018メモ
(2025/10/20)
最新コメント
なるほど、ありがとうございます。
[2023/02/25 NONAME]
ほぼご推察の通りです
[2023/02/25 ぼんどF]
ご回答ありがとうございます。
[2023/02/24 NONAME]
返信が遅れて申し訳ありません
[2023/02/24 ぼんどF]
教えて下さい。
[2023/02/21 NONAME]
RSS
RSS 0.91
RSS 1.0
RSS 2.0
リンク
管理画面
新しい記事を書く
ページトップ