基本スペックについて
・測定距離範囲
・距離精度
・角度分解能(測距周期に依存)
・回転周期
距離範囲と距離精度の説明は割愛
角度分解能と回転周期
回転タイプのLiDARは1つの測距センサーを高周期で測距しながら回転させています。
どれだけ細かく測定できるかは
測距周期と
回転周期によって変化します。
回転周期を変更する機能を持っていることが多く、用途に応じて
回転周期を遅くして、
角度分解能:高、
リアルタイム性:低
回転周期を早くして、
角度分解能:低、
リアルタイム性:高
の様な調整が可能です。
遠くにある細い障害物を検出するには
角度分解能が重要です。
高速で移動する物体を検出するには
リアルタイム性が重要です。
移動ロボットの障害物回避に使用するには
角度分解能も
リアルタイム性も必要なので
測距周期は重要なパラメータとなります。
10Hzで回転させたときに1m先で何mmの物体を検出できるかの概算値を併記しておきます。
ノイズ対策として1点のみ検出したデータを除外する様な処理を行う場合は倍の幅が必要です。
気にした方が良いこと
環境光への耐性
冒頭での説明の通り、LiDARは赤外線レーザーを使っているため屋内向けでは太陽光の
赤外線に負けて測定できません。また、LiDAR本体に太陽光が当たると色々トラブルが
発生します。障害物回避の様な安全装置として使うのであれば確実に動作することが
大切です。どの程度の環境光で使用可能かはルクス(Lux、lx)として表記されています。
晴天時の明るさは100klx(100000Lux)程度となる様です。
消費電流
レーザー距離とモーター回転を同時に行うのでかなり電気を食います。
今回はラズパイのUSBから電力を供給しながら動かすことを想定していますが、
供給電力の上限に引っかかってリセットすることが多々あります。
待機電流/定常電流/起動電流(ピーク×時間)として表記しておきます。
AbudoriLab様は電源と振動への対策のため
Ethernet&別電源タイプを推奨するとのことです。
例:RPlidar S2E
電源電圧などについては今回テストしたものは全て電源5V、信号3.3Vでした。
コネクタ
USB接続タイプはシリアル通信変換器にmicroUSBタイプが採用され例ることが多いです。
しかし、移動ロボットを屋外走行させていると振動でmicroUSBがゆるくなり断線が多発
します。対策としてシリアル変換器を自分で用意したものへ交換することになります。
ところが、シリアル通信に使うコネクタはメーカーごとにバラバラです。
特殊なコネクタの場合は専用の工具が必要になることがあります。
また、備忘録としてデフォルトの通信速度を載せております。
固定方法
LiDAR本体が動くのはいいけど、ロボットに固定する時に結構困ります。
固定方法が判明している場合はネジ類も一緒に注文するのが良いでしょう。
実験上の注意
この記事を作成中にRPLIDAR C1の距離測定ができなくなってしまいました。
コマンドを送ると回転+レーザー照射はできるものの距離と強度が0として出力されます。
近距離で横に並べて実験していたため、隣のLiDARから照射されたレーザーが受光素子
に直撃したことにより受光素子が壊れてしまった可能性があります。
実験の際にはLiDAR同士が近距離で向かい合わない様に注意が必要そうです。
RPLIDAR C1
測定距離:0.05~12m
距離精度:30mm
測距周期:5kHz
角度分解能:0.72度@10Hz → 12mm@1m
回転周期:8-12Hz
耐環境光:40klx
コネクタ:XHP-6(2.54mmピッチ6極)
電圧 :電源4.8~5.2V、通信3.3V
通信速度:460800 bps
消費電流:150mA/250mA/1000mA×70ms
固定方法:
M2.5タップ穴×4価格:1万4千円~1万8千円ぐらい
その他:本体部 防塵防水等級 IP54
一番最初に購入しました。
起動の瞬間に1000mA必要になりますが、比較的穏やかです。
固定ネジが普段使わないM2.5なのでホームセンターに買いに行きました。
M2.5は品揃えがあまり良くないのでネジ探しに苦労するかもしれません。
本体部は防水等級
IP54なので雨天でも安心して使えます。(配線の付根はちょっと心配)
真夏に直射日光の当たるアスファルトや壁を5mぐらいまで検出できます。
しかし、太陽光の反射によりノイズが発生することが判明したためS2Lへ変更しました。
通信フォーマットはスキャン開始コマンドに対して応答が返ってきた後は
スキャンデータをヘッダ無しでひたすら
強度、角度、距離、強度、角度、距離・・・の順で送られてくるので自分で解析しようとするとちょっと厄介。
標準の確認ソフトを使うのにログインを求められるのが嫌な感じ。
RPLIDAR S2L
測定距離:0.05~18m
距離精度:30mm
測距周期:32kHz
角度分解能:0.1125度 → 2mm@1m
回転周期:10Hz
耐環境光:80klx
コネクタ:XHP-6(2.54mmピッチ)
電圧 :電源4.9~5.2V、通信3.3V
通信速度:1000000 bps
消費電流:400mA/450mA/750mA×200ms
固定方法:M3タップ穴×4
価格:3万4千円~5万5千円ぐらい
その他:本体部 防塵防水等級 IP65
2024年度の確認走行~本走行で使用しました。
常時450mA消費するので色々な電力制限に引っかかります。
また、
電源電圧の下限が4.9Vで電圧低下に弱く、ラズパイで使うと頻繁にシャットダウンします。
対策として
昇降圧レギュレータを追加しました。
非常にしっかりとした製品ですが、趣味で使うには若干オーバースペックかもしれません。
通信フォーマットはC1とは通信速度が違うぐらいであとは互換性あり。
耐環境光が
40klxで足りず
80klxで対応できたので、中間の
60klx品を追加購入しました。
T-mini plus
測定距離:0.05~12m
距離精度:20mm
測距周期:4kHz
角度分解能:0.54度@6Hz → 10mm@1m、
0.9度@10Hz → 15mm@1m回転周期:6-12Hz
耐環境光:60klx
コネクタ:GH1.25-4P / PHR-5(2.0mmピッチ)
電圧 :電源4.8~5.2V、通信3.3V
通信速度:230400 bps
消費電流:280mA/300mA/750mA×0.2ms
固定方法:
長いΦ2穴×2価格:1万2千円~1万5千円ぐらい
その他:
USB変換器がTypeC2024年度の本走行後に購入しました。
記事作成時点では走行に使用していません。
秋月電子やスイッチサイエンスなどでも購入可能です。
回転周期10Hzで運用するには
角度分解能がC1より荒くなります。
電源投入時点では回転周期が6Hzに設定されており10Hzで使用するには
回転周期を変更する必要がありますが、回転周期は目標値の指定ではなく
1Hzまたは0.1Hz刻みの
UP/DOWNコマンドを送ることになります。
本来は現在の回転周期を取得して差分に応じてUP/DOWNすべきですが、
めんどくさいので6回UPで上限の12Hzまで上げた後で2回DOWNさせました。
裏が基板むき出しです。
固定には20mmぐらいのM2ネジが必要です。
ネジはミニ四駆用パーツとしても入手できます(
Item No:15508 等)
YDLIDARの他機種もそうですが
USB変換器がTypeCなのはありがたいです。
同社
GS2とは
通信フォーマットが盛大に違うので要注意。
制御コマンドや応答コマンドはC1と非常に似ている。
スキャンデータは
ヘッダ、速度、データ数、開始角度、終了角度、CRC、
強度、距離、強度、距離...といった感じで送られてきて、ヘッダがついているので解析はC1より楽かも
標準の確認用ソフト(左)と再現した自作ソフト(右) ※クリックで図を拡大
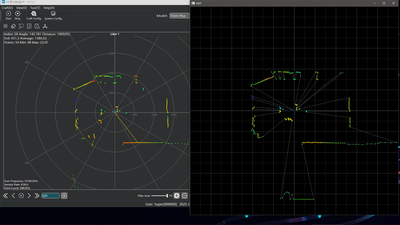
それっぽくできました。
STL-27L
測定距離:0.03~25m
距離精度:30mm
測距周期:21.6kHz
角度分解能:0.167度@10Hz → 3mm@1m
回転周期:6-13Hz
耐環境光:60klx
コネクタ:ZH1.5T-4P / PHR-4(2.0mmピッチ)
電圧 :電源
4.5~5.5V、通信3.3V
通信速度:921600 bps
消費電流:280mA/280mA/
500mA×2ms固定方法:Φ2.5孔×3
価格:2万円~2万5千円ぐらい
その他:本体部 防塵防水等級 IP5X ※防塵のみ
2024年度の本走行後に購入しました。
記事作成時点では走行に使用していません。
低価格の割にカタログスペックは高めです。
データ取得はシリアル通信ですが、
速度設定は20k~50kHzのPWMです。
速度設定端子をGNDに落とした状態で電源を入れると回転・測距が始まります。
速度設定端子をGNDに接続した場合は10Hzで回転します。
データシートには電源電圧の下限が4.5Vと記載されていますが
実際には4.9Vぐらいです。
何だかはっきりしませんが、付属のUSB変換器では通信できませんでした。
固定穴径は2.5mmなので短いM2ネジでも固定できます。
通信フォーマットはデータ受信のみなので細かい設定ができないものの解析は楽。
スキャンデータは
ヘッダ、データ数、速度、開始角度、
距離、強度、距離、強度...、終了角度、時刻、CRC
の順で送られてくる。
1送信あたりのデータ数は現行品で12ポイント(2度@10Hz)固定らしい。
標準の確認ソフト(左)と再現した自作ソフト(右) ※クリックで図を拡大

こちらもそれっぽくできました。
環境光の影響調査
太陽光の影響を調査します。

実験出来次第随時結果を追加します。
測定面への照射
基本的には測定可能距離が短くなります。
また、測定面の色やLiDARと正対しているかも変わります。
最大値/正対面/アスファルトの順に記録します。
・C1:12m/11m未満/4m
・S2L:18m/15m以上/8m
・T-mini:12m/11m/4m
・STL-27L:25m/15m以上/5m
本体への直射照射
本体に日光を当てるとどうなるか確認
基本的に真上から日光が照射される場合は影響がありません。
日が低い時期・時間帯に注意が必要です。
本体への反射光照射
アルミ板を使って太陽光を反射させてLiDARに照射した場合
・C1
アルミ板のある付近に広くエラーなど発生します
エラーとしては測定不能のほか障害物かノイズか判断できない値も出ます
近距離での障害物回避に影響します。
・S2L
ほぼ影響がありません。
・T-mini
アルミ板のある付近に広くエラーなど発生します
エラーとしては測定不能がほとんどなので障害物回避に影響はないと思います。
・STL-27L
アルミ板のある付近に狭い範囲でエラーなど発生します。
エラーとしては測定不能のほか5m以上先の点として誤検出されます。
近距離の障害物回避に用いるだけなら大きな影響は無いと思います。
透明遮光シールドの効果
直射日光が当たらないかつ中を見れる透明な素材が無いか調べました。


かなり暗いですが一応中が見えます。
板系

フィルム系

S2Lを使って効果を確認しています。
効果あり
・グレイスモーク下敷き(材質不明)
・ポリカーボネートスモーク板
・車用ミラーフィルム
・窓用遮熱フィルム(詳細不明)
・グレイスモークの下敷き
厚さや可視光透過など非常に都合が良いのですが、十分な大きさのものが入手できませんでした。
昔買ったものだったので何処で材質はおろか何処で購入したのかも不明です。
・ポリカスモーク板
可視光透過性に対して太陽光の遮光効果が優れています。
曲げて使いたかったのですが、厚手のものしか入手できず曲げる手段が無かったので使用を
断念しました。
・車用ミラーフィルム
ミラー系は総じて効果がありそうですが、他のロボットのLiDARで自身を検出されなくなり
追突される恐れがあるのでNG(他のロボットから見えやすいの条件から外れる)
・窓用遮熱フィルム
以前買ったものを使用したので詳細はわかりません。
効果はありますが、重ねた方が良さそうです。
確認走行の際にはこれを使いました。
簡単に張りなおせるように水で張り付けるタイプだったので接着に苦労しました。
水溶性のスティック糊をシールド全体に塗り、霧吹きで水を吹いて薄く広げました。
めんどくさい上にシールタイプト比べて接着力が弱くはがれやすいです。
効果なし
・養生テープ
・塩ビ カラー下敷き、塩ビ カラー板(サンデーシート)
・塩ビ スモーク板(サンデーシート)
・アクリル スモーク板
・ポリカーボネート 透明板
・車用スモークフィルム
・車用スモークフィルム(遮熱タイプ)
・養生テープ
フィールドテスト中に日光が影響していることが発覚したため応急処置として使いました。
後日確認したところ、視認性が低下するだけで日光を防ぐ効果は確認できませんでした。

・塩ビ カラー下敷き、塩ビ カラー板
グレイスモークに効果があったのに反して、カラー系はほとんど効果がありませんでした。
赤と緑を重ねると真っ黒になり可視光はほぼ通しませんが、日光はしっかり通します。
・塩ビ スモーク板
塩ビ スモーク板はポリカとほぼ同じ見た目にも関わらず効果はほとんどありません。
・アクリル スモーク板
塩ビ スモーク板と同様に見た目が同じにも関わらず効果はほとんどありません。
・ポリカ透明板
ポリカ自体に効果があるのか試してみましたが効果はありませんでした。
・車用スモークフィルム
画像処理の実験用に色々な濃さの物を持っていましたがどれも効果はありませんでした。
・車用スモークフィルム(遮熱タイプ)
カー用品店で遮熱タイプなるものを見つけたので試してみましたが効果はありませんでした、